eforth_core.cpp File Reference
eForth core controller module More...
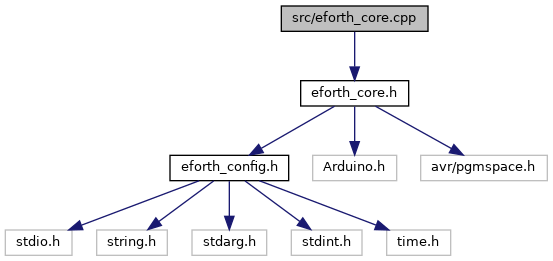
#include "eforth_core.h"
Include dependency graph for eforth_core.cpp:
Data Structures | |
| struct | IsrRec |
Macros | |
| #define | _fake_intr(hits) |
| #define | YIELD_PERIOD 50 /** 256 max (1ms ~ 50*20us/op) */ |
Functions | |
| void | intr_reset () |
| reset interrupts More... | |
| IU | intr_service () |
| void | intr_add_tmisr (U8 i, U16 ms, U16 xt) |
| void | intr_add_pcisr (U8 p, U16 xt) |
| void | intr_pci_enable (U8 f) |
| void | intr_timer_enable (U8 f) |
| ISR (TIMER2_COMPA_vect) | |
| ISR (PCINT0_vect) | |
| ISR (PCINT1_vect) | |
| ISR (PCINT2_vect) | |
Variables | |
| IsrRec | ir |
Detailed Description
eForth core controller module
Macro Definition Documentation
◆ _fake_intr
| #define _fake_intr | ( | hits | ) |
◆ YIELD_PERIOD
| #define YIELD_PERIOD 50 /** 256 max (1ms ~ 50*20us/op) */ |
service interrupt routines
Function Documentation
◆ intr_reset()
| void intr_reset | ( | ) |
reset interrupts
reset interrupt states
◆ intr_service()
| IU intr_service | ( | ) |
cached interrupt flags
throttle counter
- on x86 platform
- throttle down (boot performance a bit)
- reset throttle counter
◆ intr_add_tmisr()
◆ intr_add_pcisr()
◆ intr_pci_enable()
| void intr_pci_enable | ( | U8 | f | ) |
enable/disable pin change interrupt
◆ intr_timer_enable()
| void intr_timer_enable | ( | U8 | f | ) |
enable/disable timer2 interrupt
◆ ISR() [1/4]
| ISR | ( | TIMER2_COMPA_vect | ) |
Arduino interrupt service routines
◆ ISR() [2/4]
| ISR | ( | PCINT0_vect | ) |
◆ ISR() [3/4]
| ISR | ( | PCINT1_vect | ) |
◆ ISR() [4/4]
| ISR | ( | PCINT2_vect | ) |
Variable Documentation
◆ ir
| IsrRec ir |
interrupt state management
